STM32 정리
TOF 센서(VL53L1X) (2)
dawon-project
2025. 1. 9. 16:08
TOF 센서(VL53L1X) (1)
VL53L1X : 적외선 레이저를 방출하여 대상에 대한 반사시간(즉, 부딪혀서 되돌아오는 시간)을 측정시야각 : 15도~27도 => 거의 한점을 detecting -> why? 제일 가까운 것으로 들어옴 => 풀업 방식으
dawon-project.tistory.com
<보정을 안한 후 기본 측정 결과>
- RGB기준으로 3.2m까지는 측정거리 값이 출력되었으나 3.2m를 넘긴 후 부터는 측정값의 변동폭이 너무커 정확한 값을 출력할 수가 없었습니다.
- 아크릴로 투명한 물체를 측정했을 때, 움직이는 순간만 센서가 인식한 후 아크릴이 고정된 후부터는 인식하지 못하였다.
- 투명한 물체에 플래시를 비춰본 결과 빛의 반사각에 따라 인식되는 물체가 달라졌다.
- 우천시의 상황을 고려하여 분무기로 물을 뿌려 상황을 재현해 본 결과 거리측정이 가능하였다.
- 폭우 수준의 강우량이라면 측정 결과의 변동폭이 컸다.
<내부 패키지를 통해 센서를 보정한 후의 결과물>

=> 똑같은 상황에서 실험 했을때의 측정 데이터를 출력한 것
=> 모드 설정 및 ROI(각도) 설정에 따라 값이 달라지는 것을 알 수 있음
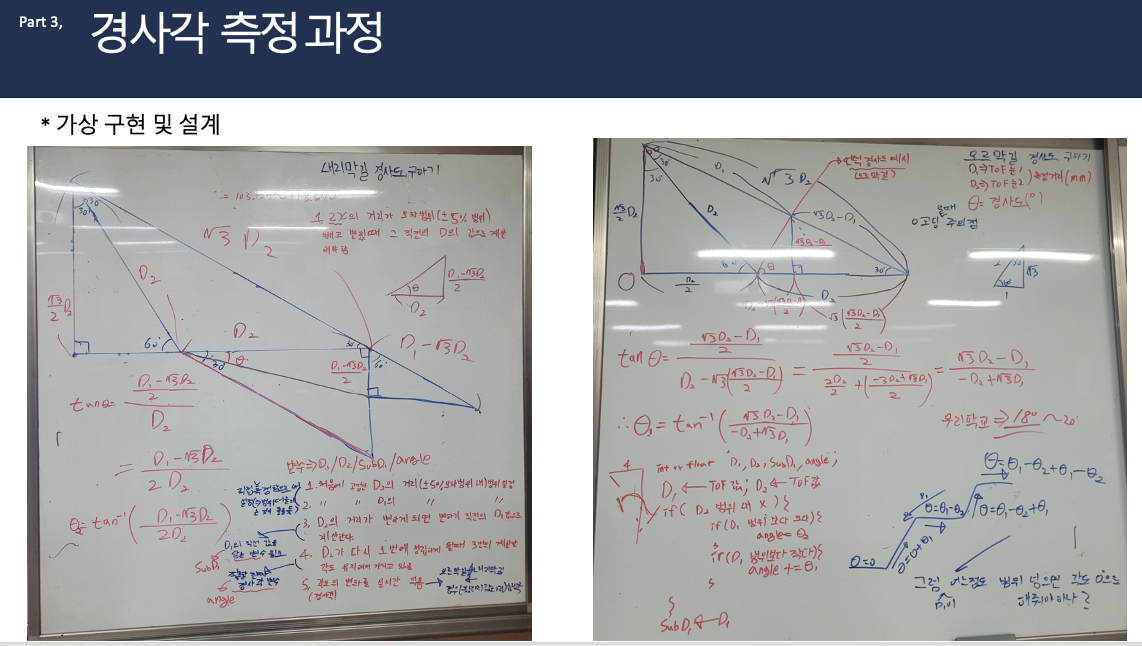
<TOF 2개를 통한 경사각 알고리즘 구현>





 0123456
0123456
<알고리즘 구현 후 느낀점>
- 실제 환경과 비슷하게 해서 실험을 했을때 비교적 비슷하게 나왔으나 TOF의 특성상 레이저가 쏘고 있는 일직선상에서의 지면의 경사도만 측정할 수 있다는 한계점이 존재한다.
=> 측정하는 "선"상에서도 노면(지면의 상태)의 상태에 따라 정확하지 않은 값이 측정되었다. - 3D LiDar를 사용해 지면에 여러개의 선을 그려서 평균을 내는 것이 비교적 정확할 것 같다.