모터 : 전기 에너지를 이용하여 운동 에너지를 만들어 내는 장치
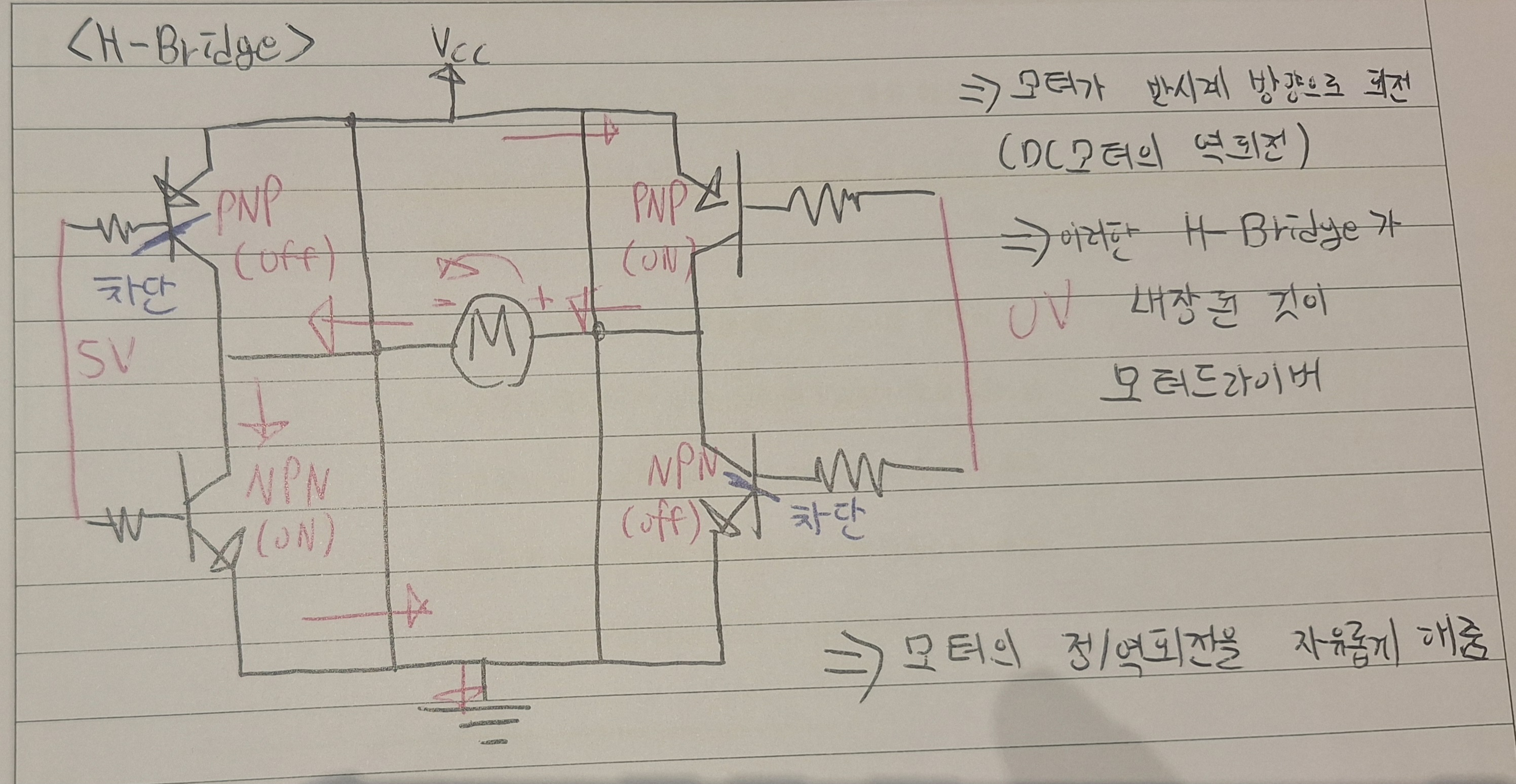
-> 보통 모터 드라이버를 통해 모터를 제어하며, 모터 드라이버 내부에는 H-Bridge 회로가 들어 있다.
-> H-Bridge 회로를 통해서 모터가 왼쪽 또는 오른쪽으로 회전이 자유자재로 가능하다.
-> PWM 제어를 통해서 RPM 제어를 해서 원하는 속도로 모터 제어가 가능하다.
<모터 종류>
- DC 모터(브러시드 DC 모터)
구조 : 브러시와 정류자를 통해 전류를 공급받아 회전
제어 방식 : 전압 크기를 조절하거나, 전류 방향을 바꿔 회전 속도와 방향 제어 가능
장점 : 구조가 단순하고, 저렴하며, 제어가 쉽다.
단점 : 브러시와 정류자 간의 마찰로 인해 마모가 발생할 수 있어, 유지 보수가 필요하다. - BLDC 모터
구조 : 브러시 대신 전자 스위칭을 이용해 전류를 공급하며, 정류자는 내장된 회로 또는 외부 드라이버가 수행
제어 방식 : 전용 드라이버 회로 (ESC 등)가 필요하며, 정밀 제어 가능
장점 : 효율이 높고, 수명이 길며, 정밀 제어와 고속 회전에 적합
단점 : DC 모터보다 비싸며, 제어가 복잡하다. - 스텝 모터 (Step Motor) -> 정밀한 각도 제어
구조 : 고정자와 다수의 전자기 코일로 구성 / 일정 각도로 단계적 회전
제어 방식 : 디지털 신호로 제어
장점 : 정밀한 위치 제어가 가능하며 피드백 없이 동작 가능
단점 : 고속 동작에서 효율이 낮고 토크가 약함 - 서보 모터 (Servo Motor) -> 정밀한 위치 제어
구조 : DC 또는 AC 모터에 피드백 제어 시스템이 추가된 것
제어 방식 : 피드백 시스템으로 속도, 위치, 토크 제어
장점 : 정밀 제어 가능, 높은 효율
단점 : 가격이 비싸고, 제어가 복잡하다. - 기어 모터 (Geared Motor)
구조 : 모터와 기어 박스가 결합된 형태
제어 방식 : 기어비에 따라 속도와 토크 조정
장점 : 저속에서도 높은 토크 제공
단점 : 기어비에 따른 속도 제한 - 엔코더 모터 (Encoder Motor)
구조 : 일반 DC 모터나 BLDC 모터, 또는 스텝 모터에 엔코더(Encoder)가 결합된 형태
제어 방식 : 피드백 제어(PID 제어와 같은)를 기반으로 동작
장점 : 정확한 위치 및 속도 제어 / 고속 응답성(모터의 상태를 즉시 확인하고 조정 가능)
단점 : 일반 모터에 비해 가격이 비싸다 / 복잡한 제어 시스템
=> 엔코더를 직접 사서 모터에 부착 가능하다.
** 브러시(Brush) : 전류를 회전하는 모터의 회전자(로터)로 전달하는 역할을 하는 전도성 물질
정류자(Commutator) : 모터 내부에서 전류의 방향을 바꾸는 역할을 하는 회전 장치
전자 스위칭(Electronic Switching) : 정류자와 브러시를 대신하여 전류를 전자적으로 변환하는 방식 -> 트랜지스터, MOSFET 이용
ESC(Electronic Speed Controller) : 전자식 속도 제어기로, BLDC 모터나 드론 모터에서 속도, 방향, 전력 공급을 조정
-> PWM 신호를 통해 제어
고정자(Stator) : 모터의 고정된 부분으로, 전자기장을 생성하거나, 회전자를 지지하는 역할
전자기 코일(Electromagnetic Coil) : 전선을 나선형으로 감아 전류를 흘렸을 때 자기장을 발생시키는 장치
기어 박스(Gear Box 또는 감속기라고도 부름) : 모터의 출력 축에 연결된 기어 시스템으로, 모터의 속도와 토크를 조정하는 역할
=> 필자의 경우 실외 배달로봇을 만들때 킥보드에서 사용하는 인휠 BLDC 모터(바퀴와 모터가 결합된 형태의 모터)를 사용했었는데 그때 내리막길에서 ESC도 없고, 토크 값 자체도 거의 없어서 뒤로 계속 밀려나는 문제가 발생했었다. 이처럼 각 상황에 맞게 모터를 선택해야한다.
<모터 드라이버의 역할> -> 모터를 효율적이고 안전하게 제어하기 위해 사용
- 전류 증폭
- 전압 변환 및 분배
- 전류 방향 제어(정/역회전) -> H-Bridge 회로를 이용
- 속도 제어 -> PWM(펄스 폭 변조)를 통해 모터 속도 제어
- 보호 기능 -> 역기전류, 과전압, 과전류, 과열 과 같은 상황에서 모터와 마이크로 컨트롤러 보호
- 모터 제어가 편리하도록 해줌
<H-Bridge 회로>
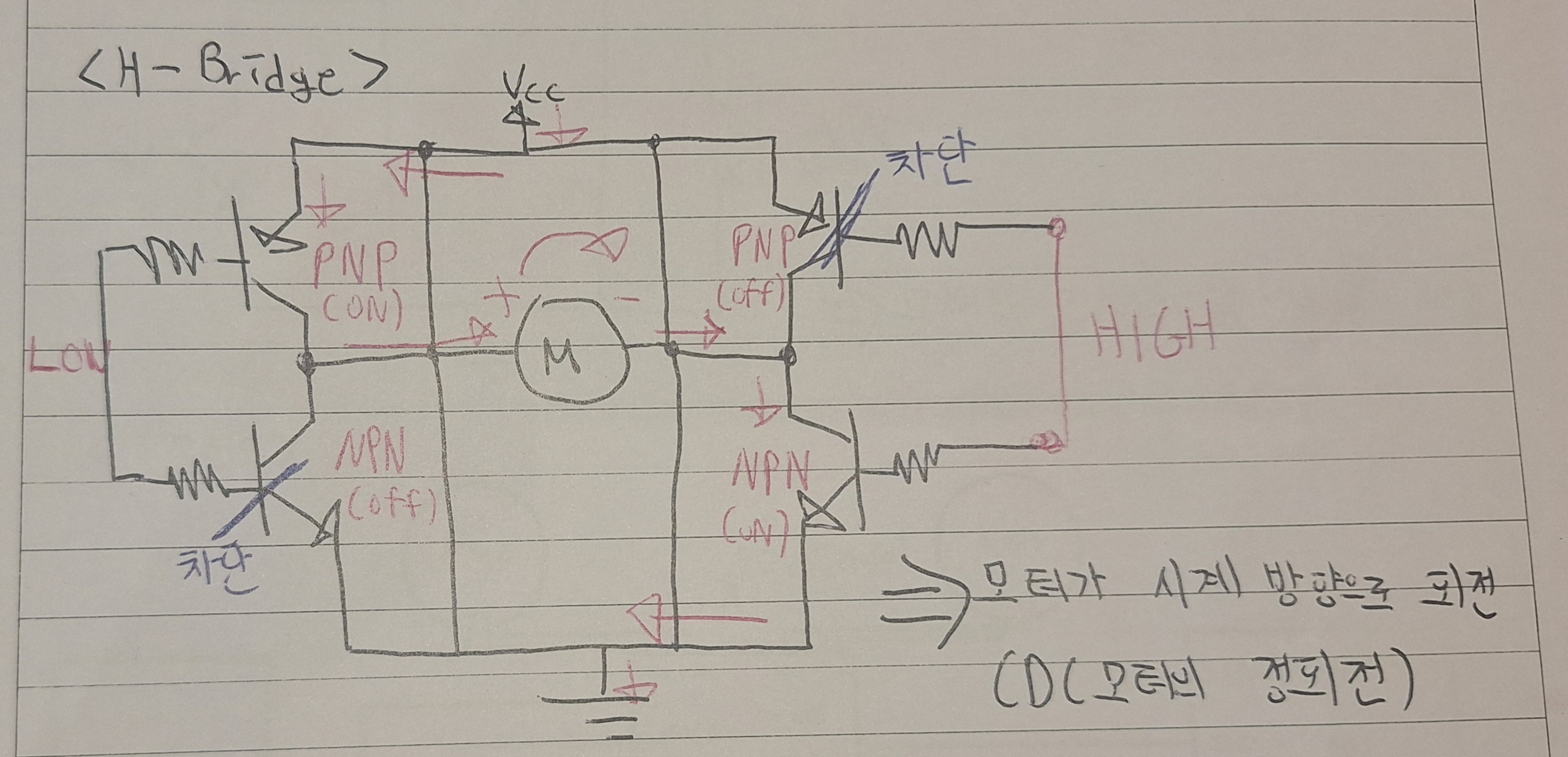
=> NPN은 1(High)일때 ON
=> PNP는 0(Low)일때 ON
=> 쇼트 방지를 위해 왼쪽과 오른쪽을 각각 묶음
=> 전압 강하(전류가 저항이나 회로 내의 소자를 지날 때 전위 차가 감소하는 현상)가 일어나야지 전류가 흐르게 된다.
-> 즉, 전압강하는 비교적 높은 전압에서 낮은 전압으로 떨어질때 발생하는 현상이다. ex)5V -> 0V
'STM32 정리' 카테고리의 다른 글
| 라이다 (0) | 2025.01.13 |
|---|---|
| Gobilda 엔코더 모터와 Roboclaw 모터 드라이버 (0) | 2025.01.12 |
| 블루투스(HC-06) (0) | 2025.01.12 |
| GPS(BN-880Q) (0) | 2025.01.10 |
| 초음파 센서 (SRF05와 SRF08) (0) | 2025.01.10 |